Tinkers Projects
Imagine | Develop | Create









Programable Time Lapse
Categories: Machines
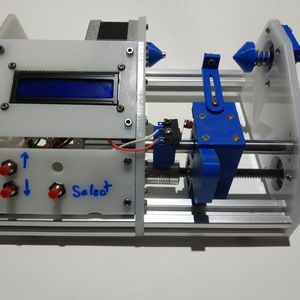
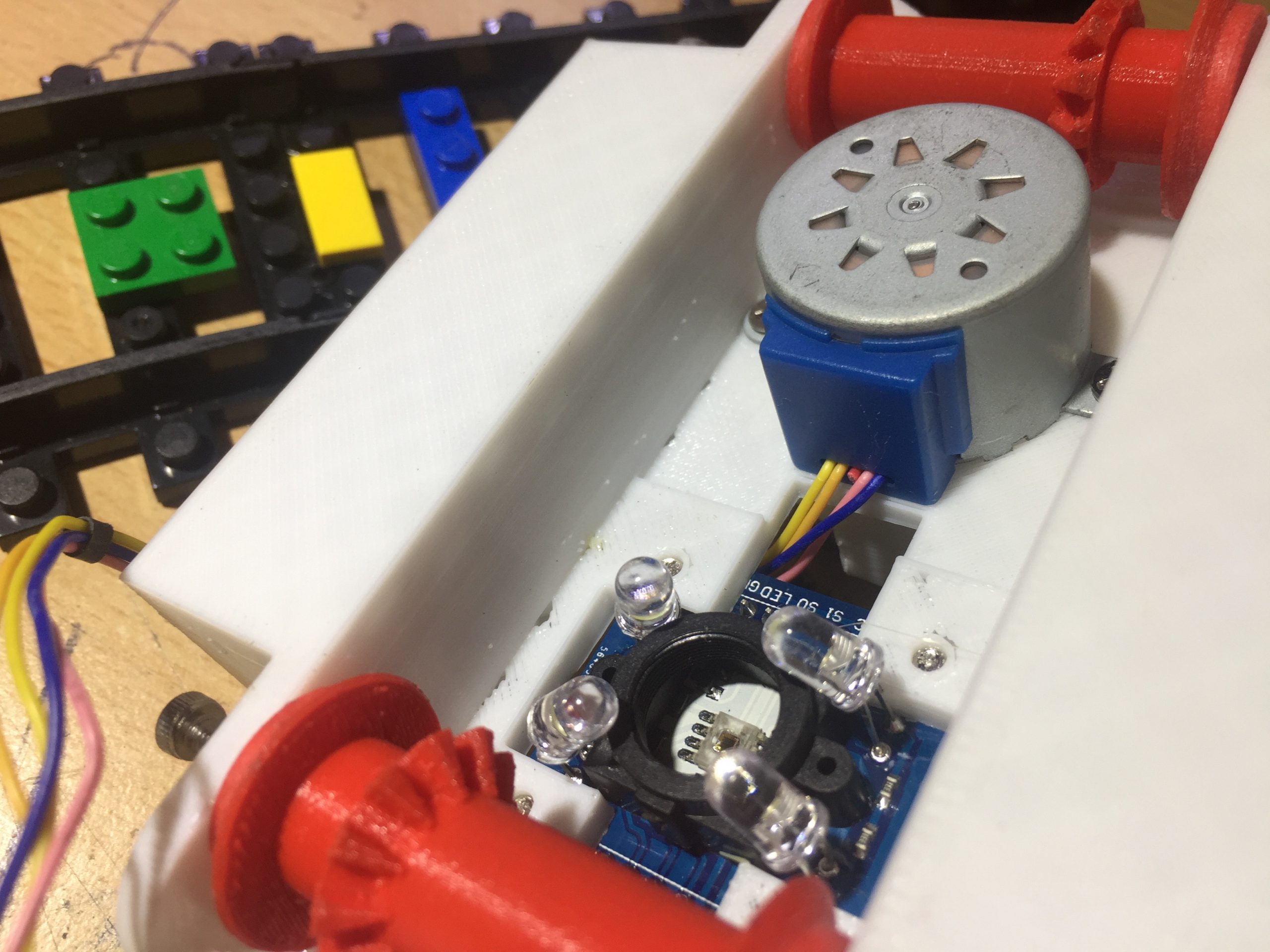
This is a programable time lapse for a Go-Pro where tiles on the track deterands how it moves. The system can move in backward/forwards, rotate the camera and soon tilt the camera (when i get more time). It uses Lego train track as the track to guide it along and place programing tiles. The tiles are different colors which get a colour sensor reads and changes moving mode. Currently there are 4 colours with 4 different modes. Green (also starting mode) is full travel speed with no other movements. Blue is start rotation of camera. Yellow is half the speed. Red is stop. More colours will be added soon. The wheels are held in place with 2 x 20mmxM3 screws and driven by a 28byj-48 stepper motor. The system can be run from a 9V battery but cannot last long with out being replaced.
Keep up to date
New Parts will be added, Keep up to date by following: This Thing -> https://www.thingiverse.com/thing:2825424 my Profile -> https://www.thingiverse.com/haybailes/aboutCode for Project
GNU General Public License v3.0#include <AccelStepper.h>
#define S0 3
#define S1 2
#define S2 5
#define S3 4
#define sensorOut 6
#define enpin 13
#define buttonpin 16
#define runningLEDpin 14
#define powerLEDpin 15
#define tolrents 2
double R = 0;
double G = 0;
double B = 0;
double ProgramedArray[5][9] = {
//R,G,B,MovDir,MovSpeed,RotDir,RotSpeed,TilDir,TilSpeed
{43,25,31,0,200,0,0,0,0}, // green
{34,35,30,0,200,0,200,0,0}, // White
{23,31,44,0,100,0,100,0,0}, // Yellow
{15,47,36,0,0,0,0,0,0}, // Red
{50,33,15,0,100,0,100,0,0} // Blue
};
AccelStepper rotatorstepper;
AccelStepper movingstepper;
AccelStepper tiltstepper;
void setup()
{
Serial.begin(115200);
getcolor();
pinMode(S0, OUTPUT);
pinMode(S1, OUTPUT);
pinMode(S2, OUTPUT);
pinMode(S3, OUTPUT);
pinMode(runningLEDpin, OUTPUT);
pinMode(powerLEDpin, OUTPUT);
pinMode(sensorOut, INPUT);
pinMode(buttonpin, INPUT);
pinMode(enpin, INPUT);
digitalWrite(enpin,LOW);
digitalWrite(S0,HIGH);
digitalWrite(S1,LOW);
digitalWrite(powerLEDpin,HIGH);
digitalWrite(runningLEDpin,HIGH);
rotatorstepper = AccelStepper(1,7,8);
rotatorstepper.setMaxSpeed(200/60);
rotatorstepper.setAcceleration(100000.0);
rotatorstepper.move(0);
movingstepper = AccelStepper(1,9,10);
movingstepper.setMaxSpeed(200/60);
movingstepper.setAcceleration(100000.0);
movingstepper.move(0);
tiltstepper = AccelStepper(1,11,12);
tiltstepper.setMaxSpeed(200/60);
tiltstepper.setAcceleration(100000.0);
tiltstepper.move(0);
}
void loop()
{
getcolor();
for(int i =0;i<sizeof(ProgramedArray);i++)
{
runsteps();
if(isColor(ProgramedArray[i][0],ProgramedArray[i][1],ProgramedArray[i][2]))
{
movingstepper.setMaxSpeed(ProgramedArray[i][4]);
movingstepper.setSpeed(ProgramedArray[i][4]);
movingstepper.setPinsInverted(ProgramedArray[i][3],0,1);
rotatorstepper.setMaxSpeed(ProgramedArray[i][6]);
rotatorstepper.setSpeed(ProgramedArray[i][6]);
rotatorstepper.setPinsInverted(ProgramedArray[i][5],0,1);
tiltstepper.setMaxSpeed(ProgramedArray[i][8]);
tiltstepper.setSpeed(ProgramedArray[i][8]);
tiltstepper.setPinsInverted(ProgramedArray[i][7],0,1);
runsteps();
if(ProgramedArray[i][4] == 0 && ProgramedArray[i][6] == 0 && ProgramedArray[i][8] == 0)
{
movingstepper.stop();
rotatorstepper.stop();
tiltstepper.stop();
movingstepper.disableOutputs();
rotatorstepper.disableOutputs();
tiltstepper.disableOutputs();
}
break;
}
}
runsteps();
}
void runsteps()
{
rotatorstepper.move(100);
movingstepper.move(100);
tiltstepper.move(100);
rotatorstepper.run();
movingstepper.run();
tiltstepper.run();
}
void getcolor()
{
R = pulseIn(sensorOut, LOW);
G = pulseIn(sensorOut, LOW);
B = pulseIn(sensorOut, LOW);
long total = R+G+B;
R = R/total*100;
G = G/total*100;
B = B/total*100;
}
boolean isColor(int r,int g, int b)
{
if(R+tolrents>r && R-tolrents<r) return false;
if(G+tolrents>g && G-tolrents<g) return false;
if(B+tolrents>b && B-tolrents<b) return false;
return true;
}This is a programable time lapse for a Go-Pro where tiles on the track deterands how it moves. The system can move in backward/forwards, rotate the camera and soon tilt the camera (when i get more time). It uses Lego train track as the track to guide it along and place programing tiles. The tiles are different colors which get a colour sensor reads and changes moving mode. Currently there are 4 colours with 4 different modes. Green (also starting mode) is full travel speed with no other movements. Blue is start rotation of camera. Yellow is half the speed. Red is stop. More colours will be added soon. The wheels are held in place with 2 x 20mmxM3 screws and driven by a 28byj-48 stepper motor. The system can be run from a 9V battery but cannot last long with out being replaced.