Tinkers Projects
Imagine | Develop | Create







I wanted to make something that could shoot nerf darts or disk when triggered. I have been looking around for a nerf blaster that I could modify but I have not been able to find one. I could have used a nerf dart blaster but through the disks or balls would be more interesting to play with. One day I just ordered some disks to see what I can do with them. After a few tests, I came up with this design. I tried to make the shooter to be a desktop turret with a round body that can put into a tube. after making the turret, I thought it looked cool without the tube.
The Turret
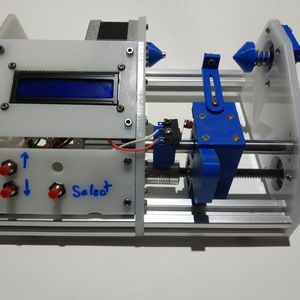
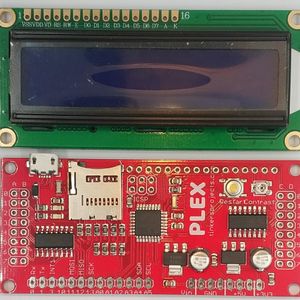
The turret uses normal nerf disks that can be bought from Aliexpress for cheap and uses 2 hobby motors at 12V to shoot the disks. A 9g hobby RC servo is used to push the disks into the motors for shooting. The system is all controlled from a custom PCB to make the electronics neat and easily mounted.Code for Project
GNU General Public License v3.0#include <Servo.h>
Servo shootingServo;
#define motorpin A1
#define startpin 0
unsigned long lastHigh = 0;
void setup()
{
shootingServo.attach(9);
shootingServo.write(0);
pinMode(motorpin, OUTPUT);
pinMode(startpin, INPUT);
pinMode(1, INPUT);
digitalWrite(1,HIGH);
}
void loop()
{
if(digitalRead(startpin)==HIGH)
{
lastHigh = millis();
digitalWrite(motorpin,HIGH);
shootingServo.write(120);
}
else
{
shootingServo.write(40);
}
if(lastHigh+1000 < millis())
{
digitalWrite(motorpin,LOW);
shootingServo.write(40);
}
}I wanted to make something that could shoot nerf darts or disk when triggered. I have been looking around for a nerf blaster that I could modify but I have not been able to find one. I could have used a nerf dart blaster but through the disks or balls would be more interesting to play with. One day I just ordered some disks to see what I can do with them. After a few tests, I came up with this design. I tried to make the shooter to be a desktop turret with a round body that can put into a tube. after making the turret, I thought it looked cool without the tube.